Identifying problem “hotspots”¶
Overview¶
At the early stages of model building where many things may be wrong with your model, working through residue-by-residue is rarely the best use of your time. Rather, you want to find and fix the biggest problems first - because once those are sorted out, the remaining clean-up generally becomes much, much easier. While one approach might be to browse through the Ramachandran and rotamer validation tools to inspect outliers one-by-one, arguably a more productive solution is to look for regions where many problems (whether they be geometry outliers, clashes or violations of reference-model restraints) are clustered in the same space. It is often the case that such clusters all share the same root cause - fix that, and many other things will fix themselves. This is where the Problem Zones tab comes in:
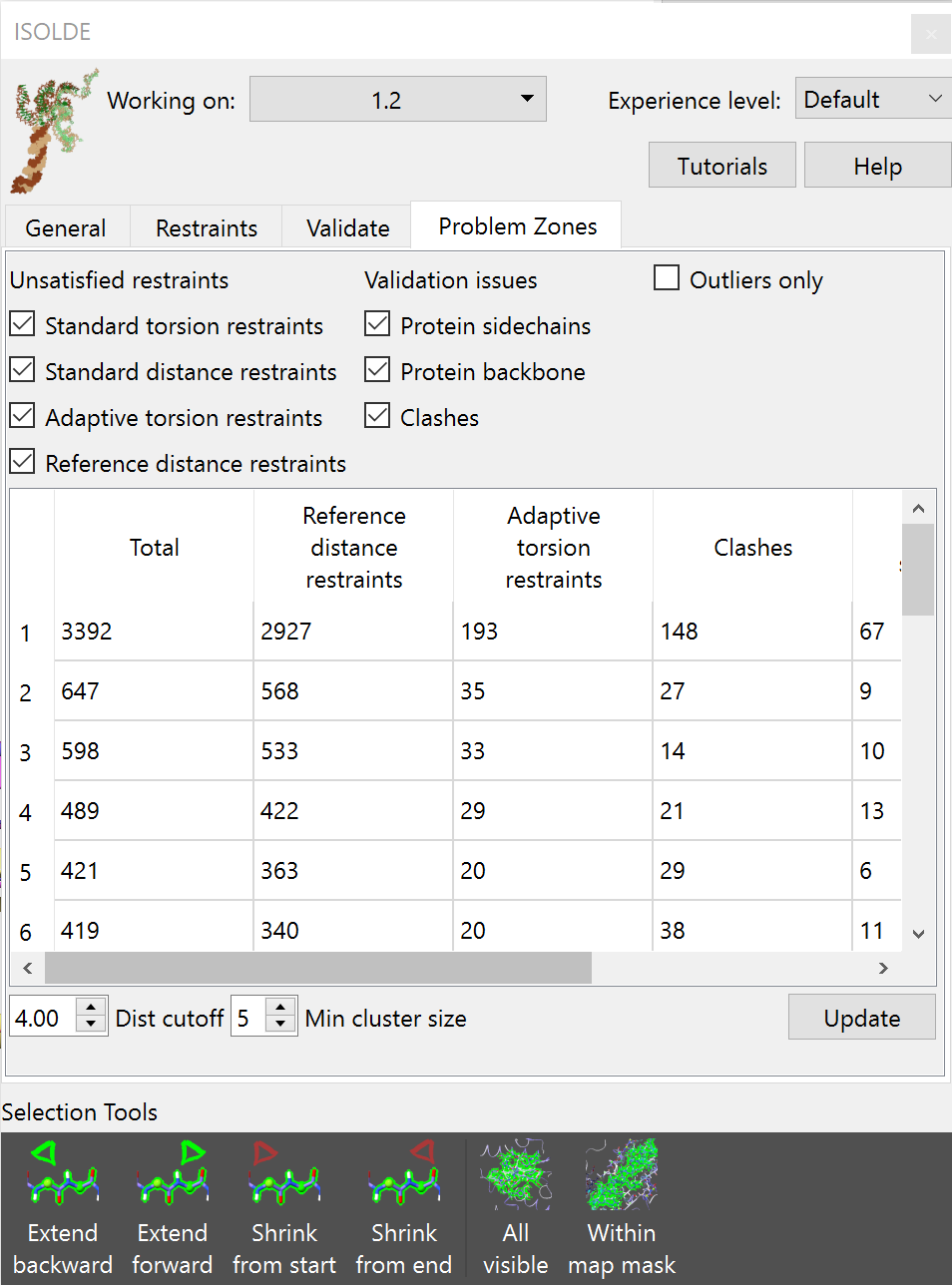
A particularly populated problem zone tab from the Improving Legacy Models Using AlphaFold tutorial.¶
Under the hood, this tool uses a spatial clustering algorithm known as DBSCAN. This has two controllable parameters (Dist cutoff and Min cluster size) which you can adjust using the combo boxes underneath the table. The algorithm works as follows:
For each “problem” point, a sphere with radius dist cutoff is searched for other problem points. If the resulting group (including the original point) has at least min cluster size points, it is considered to be the start of a cluster. Otherwise, if the group has at least two members it is considered an edge; otherwise it is disregarded as noise. Once all initial clusters are found, they are merged: any clusters that share at least one point become part of a new supercluster. Once all possible clusters are merged, edge groups are merged into nearby clusters on the same basis (i.e. if an edge shares at least one point with a cluster, it becomes part of that cluster). Each edge group will only be assigned to one cluster - if it shares points with more than one, the cluster it is assigned to will be random.
The default values for dist cutoff and min cluster size tend to work well in the presence of reference model restraints due to the sheer number of restraints typically involved. In the absence of those, you are encouraged to experiment with the values - increasing dist cutoff in particular is useful for identifying more sparsely-populated clusters.
In practice, this tool is at its most useful when working with reference-model restraints and/or when your starting model is very rough. The check boxes at top allow you to fine-tune which problems to consider - in general I’d recommend leaving everything in the first two columns checked. The “outliers only” check box affects only validation issues - as the name suggests, if checked only true outliers (typically <0.05% prior probability) will be flagged; otherwise it will include disfavoured (<2%) cases as well. As ISOLDE adds new validation metrics to its arsenal they will be added to this widget.
Clicking on any element in the table will update the main view to show the offending cluster and will select the corresponding atoms, so simply pressing the play button should start a simulation covering the appropriate region. If the table is visible on stopping a simulation it will automatically update at that point; otherwise just click the “Update” button whenever you like.